Historia de la robotica
historia de la robotica
Durante los siglos XVII y XVIII en Europa fueron construidos muñecos mecánicos con algunas características de robots.
Jacques de Vauncansos construyó varios músicos de tamaño humano a mediados del siglo XVIII. Esencialmente se trataba de robots mecánicos diseñados para un propósito específico: la diversión.
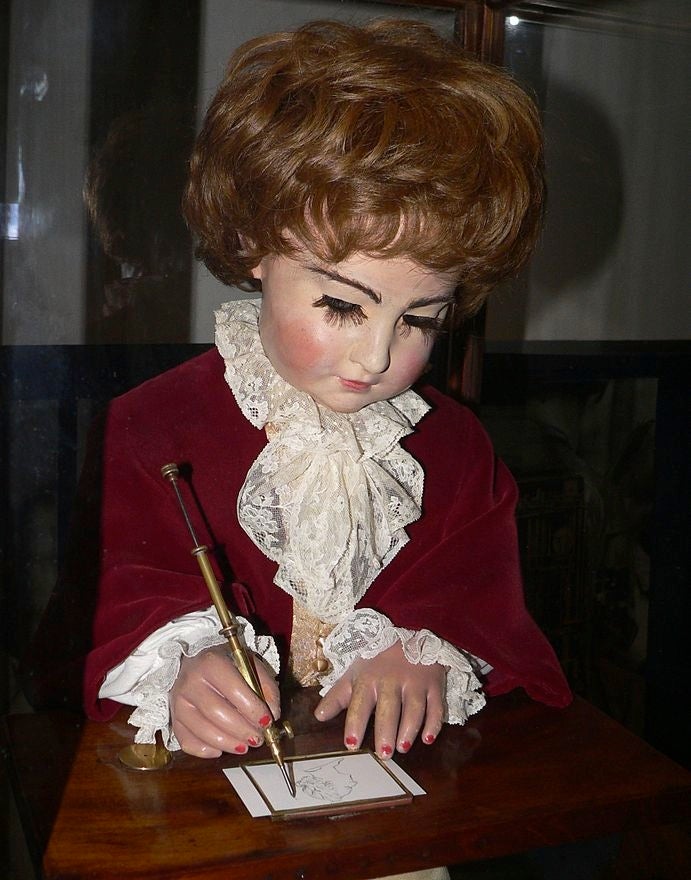
En 1805, Henri Maillardert construyó una muñeca mecánica que era capaz de hacer dibujos. Una serie de levas se utilizaban en el proceso de escribir y dibujar. Hubo otras invenciones mecánicas durante la revolución industrial, creadas por mentes de igual genio, muchas de las cuales estaban dirigidas al sector de la producción textil. Entre ellas se puede citar la hiladora giratoria de Hargreaves (1770), la hiladora mecánica de Crompton (1779), el telar mecánico de Cartwright (1785), el telar de Jacquard (1801), y otros.
No obstante las limitaciones de las máquinas robóticas actuales, el concepto popular de un robot es que tiene una apariencia humana y que actúa como tal. Este concepto humanoide ha sido inspirado y estimulado por varias narraciones de ciencia ficción.


